本研究於中山大學游泳池及海科院養殖池進行混合任務實驗,涵蓋定高、定深、定艏向、航點導航等多任務組合,結果顯示,IUT AUV-I之定高/定深誤差小於0.2公尺、定艏向誤差小於10°、航點導航誤差小於1公尺,達到國際控制性能指標。

IUT AUV-I於中山大學海科院養殖池所取得之實驗結果
本研究開發結合Tiny-YOLOv3卷積神經網路與LattePanda Alpha單板電腦之潛水員光學影像偵測模組,透過人工智慧演算法計算潛水員位置,成功實現潛水員的起伏、平擺與縱移跟隨控制,並於成功大學拖航水槽完成驗證。
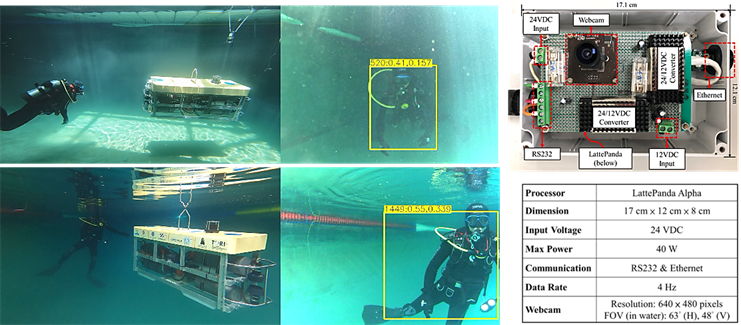
IUT AUV-I搭載潛水員影像偵測模組於成大拖航水槽追隨潛水員移動
IUT AUV-I在縱移-平擺模式下於成大拖航水槽執行潛水員跟隨實錄
IUT AUV-I在縱移-起伏模式下於成大拖航水槽執行潛水員跟隨實錄
IUT AUV-I於成大拖航水槽執行多潛水員跟隨實錄(辨識特定目標潛水員)
本研究採用前視與側向高度計,實現AUV避障與牆面追循控制法則。在成功大學拖航水槽的實驗結果證實,IUT AUV-I能成功避開人工障礙物並完成直線水槽壁面追循任務。
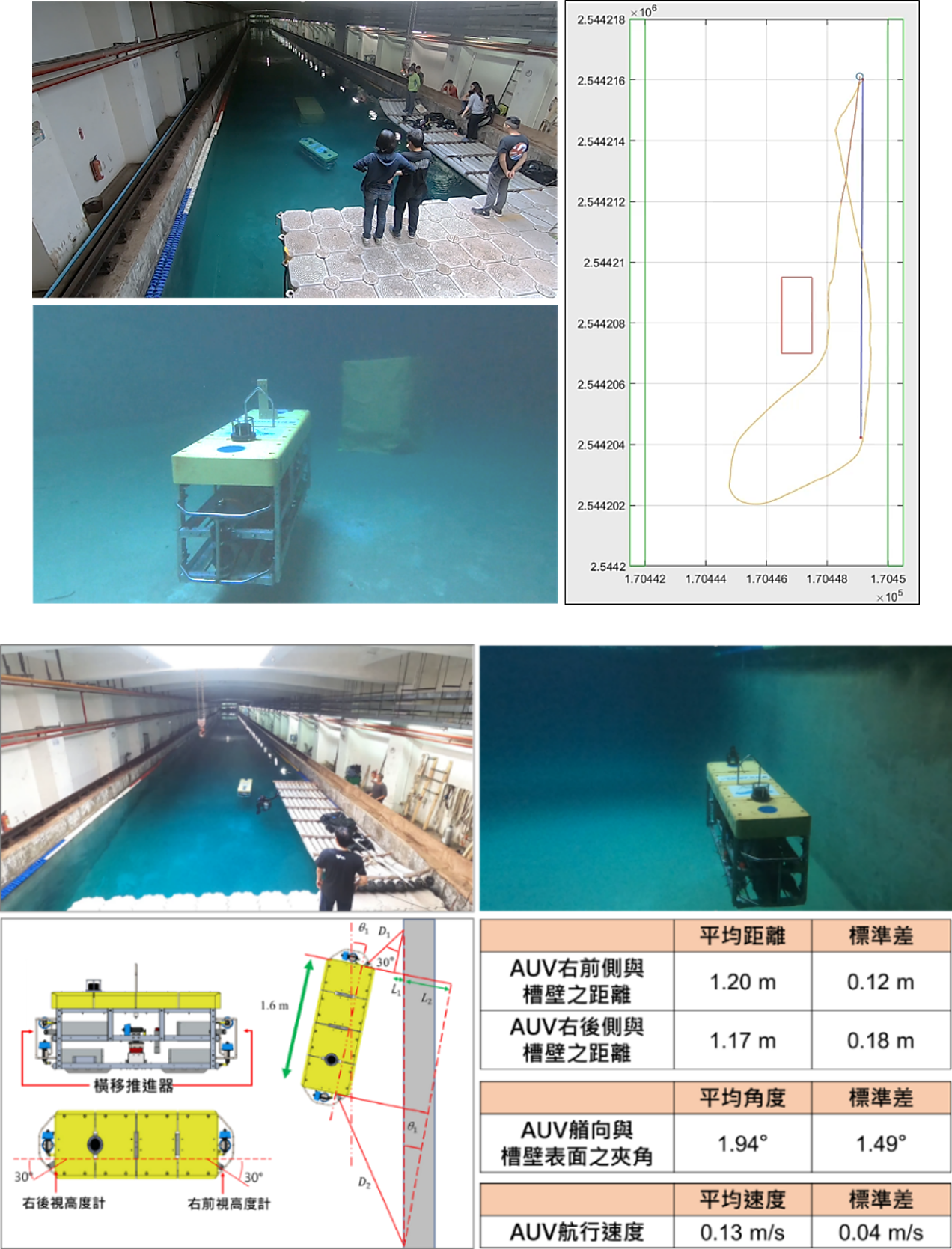
IUT AUV-I於成大拖航水槽進行基於前視高度計之避障導航(上)以及基於側向高度計之水槽牆面追循(下)
本研究參與勵進號航次,在小琉球海域利用IUT AUV-I進行多次定深 (5~9公尺) 下的側掃聲納海床測繪,驗證整體系統之功能穩定性及各酬載系統之正常運作。

IUT AUV-I於小琉球海域進行定深結合定艏向航行(上)以及定深側掃聲納海床測繪任務(下)
IUT AUV-I於小琉球海域執行定深航行與海床測繪實錄
本研究開發基於單一線型雷射之矩形水槽壁面追循與檢測方法,透過水槽實驗驗證該方法於矩形水槽進行壁面追循與高程檢測之可行性。

IUT AUV-I於矩形水槽進行基於單一線型雷射之壁面追循
本研究提出結合雷射結構光、解耦動力模式與演進式最佳化之新方法LSHPI (Laser Line Scanning for Hydrodynamic Parameter Identification),以鑑別AUV之流體動力參數。本研究利用OpenGL (Open Graphics Library)函式,創建由載具攝影機所拍攝到之雷射影像,並使用此等模擬雷射影像來驗證LSHPI之可行性。根據在不同自由度之運動干擾下的AUV流體動力參數鑑別結果,LSHPI之可行性成功獲得驗證。
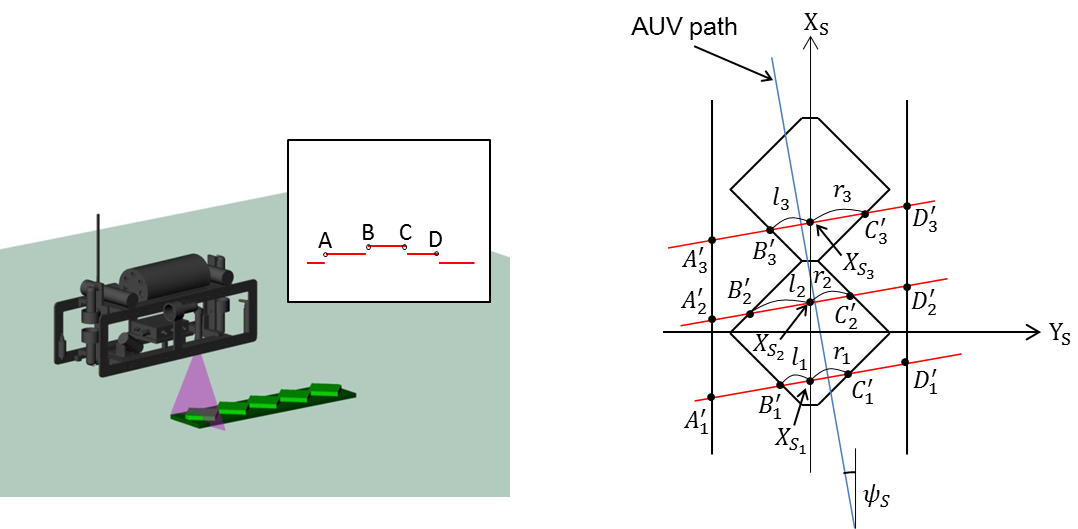
以雷射掃描影像計算AUV做縱移運動時的位置之原理示意圖
本研究係利用中山大學海下科技研究所自主開發之四架深海拖曳式載具,包括深海拖曳式即時攝影系統(ATIS)、視訊導引複管岩心採樣系統(V-Corer)、深海拖曳式光纖探測系統(FITS)、視訊導引抓斗系統(TVG),於臺灣東北海域南沖繩海槽最南端之重要場址,進行海床地貌光學影像探查所取得之海床特徵分析成果。這些光學影像資料提供科學團隊直接而客觀的證據,有助於快速掌握當地海床環境,選定合適採樣點,同時作為後續資料分析之佐證與探勘規劃之依據。

在第四與那國海丘場址所拍攝到之海床影像
本發明專利–自動推擠式採樣系統,可利用單一動力源完成海床表面沉積物之定點採樣作業。當中小型遙控式水下無人載具(ROV)搭載該自動推擠式採樣系統時,便能在無需依靠機械手臂之操作下,自動更換採樣管並執行採樣動作,完成海床表面沉積物之定點採樣作業。

自動推擠式採樣系統
本研究開發基於粒子濾波器(Particle filter)、單眼視覺(Monocular vision)之移動機器人平面目標追蹤技術,稱作PSIPT。本研究開發之技術可延伸應用於開發追隨潛水員、作為潛水夥伴(Dive buddy)之自主式水下無人載具(AUV)所應具備之移動目標光學追蹤技術。
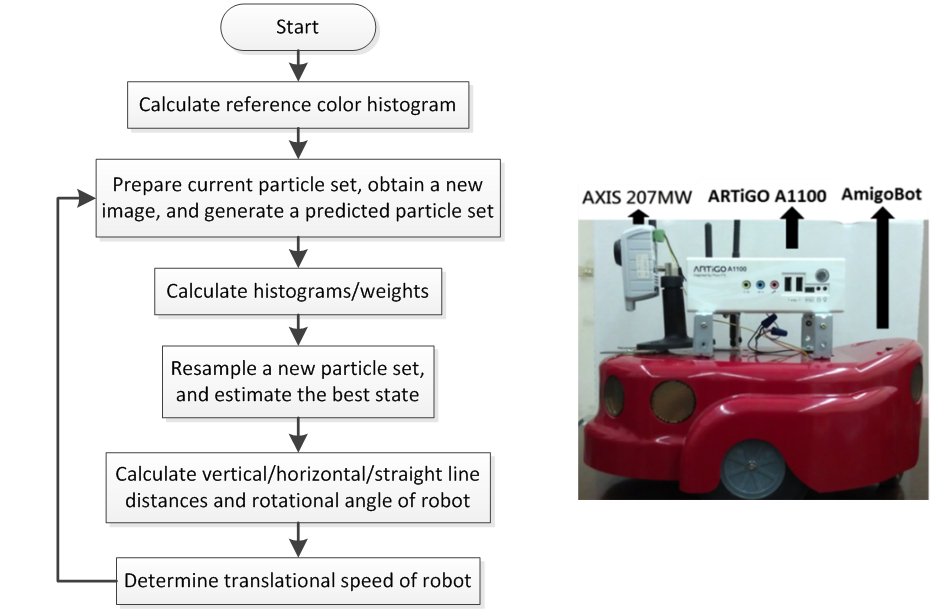
所開發之移動機器人目標追蹤法(左)以及所使用之移動機器人(右)
本研究開發基於克隆選擇(Clonal selection)之人工免疫演算法(Artificial immune algorithm),稱作CSA-MIP,應用在無線感測網路(Wireless sensor network)裡,找出最佳的移動代理人(Mobile agent)個數和每個移動代理人的訪問節點,以最小化該無線感測網路所消耗之整體能源。本研究開發之技術可延伸應用於水下無線感測網路之移動代理人路徑規劃問題。
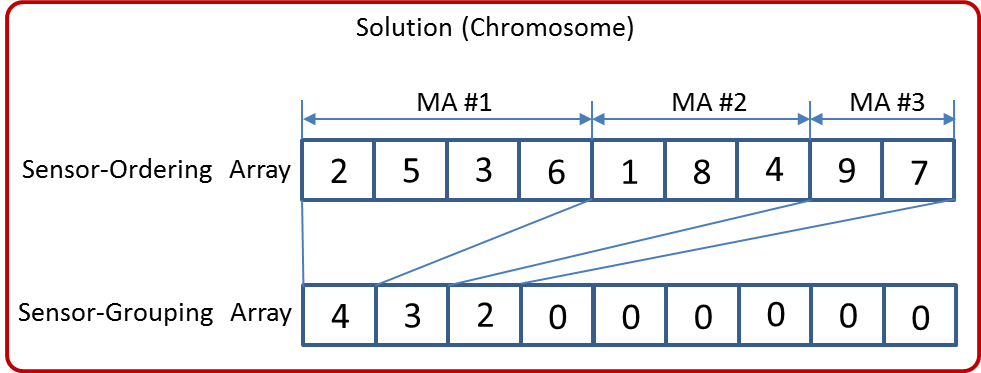
所開發演算法中移動代理人路徑規劃方案之編碼方式
本研究開發結合田口實驗設計法(Taguchi experimental design)、類神經網路(Artificial neural network),以及遺傳演算法(Genetic algorithm)之混合人工智慧系統,稱作HERON,應用於有效產生食品製造程序中的最佳製程參數,達到提高產品良率以及降低製造成本之雙重目標。本研究開發之技術可延伸應用於針對水下載具、水下儀器進行元件與系統設計時之多目標最佳化問題。
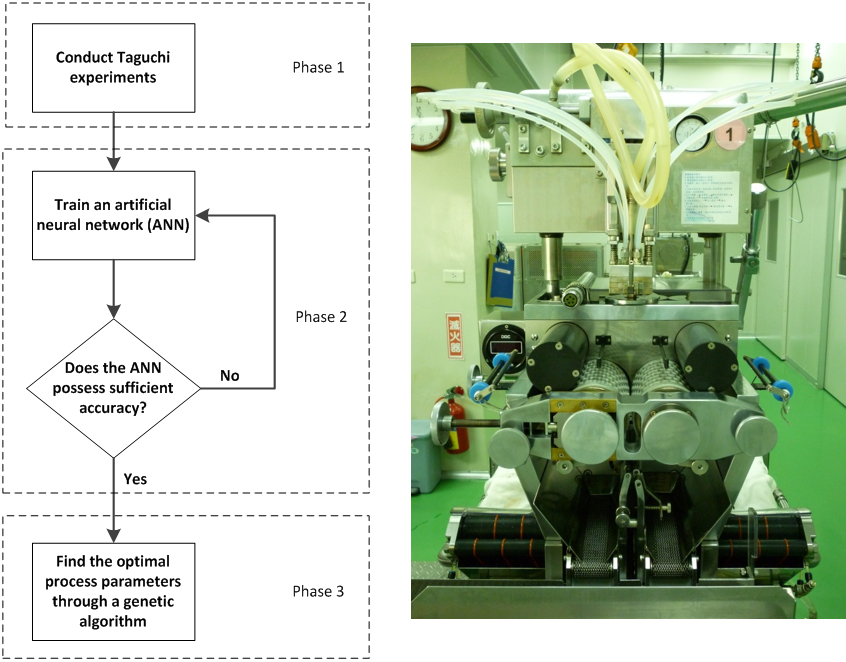
所開發之混合人工智慧系統(左)以及應用實例中的甲魚軟膠囊機台(右)
本研究開發一人工免疫仿生演算法,稱作ARISCO,應用於解決設計主動磁浮軸承(Active magnetic bearing, AMB)時所面臨之約束最佳化問題(Constrained optimization problem)。本研究開發之技術可延伸應用於針對水下載具、水下儀器進行元件與系統設計時之約束最佳化問題。
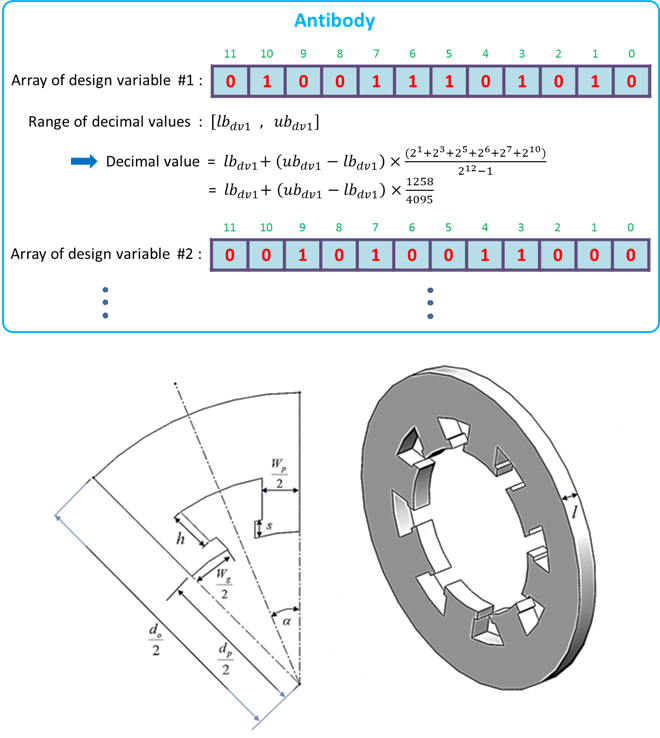
所開發演算法中設計方案之編碼方式(上)以及主動磁浮軸承設計參數(下)
此研究開發基於分割(Partitioning)、重組(Reordering),以及平行處理(Parallel processing)離散時間馬可夫鏈(Discrete-time Markov chain)之方法,稱作PPMC,以有效地利用運算資源,快速地計算出多重容錯控制器(Multi-modular redundant controller)系統之整體可靠度。本研究開發之技術可延伸應用於針對水下載具、水下儀器等多狀態複雜系統之可靠度分析和預測。
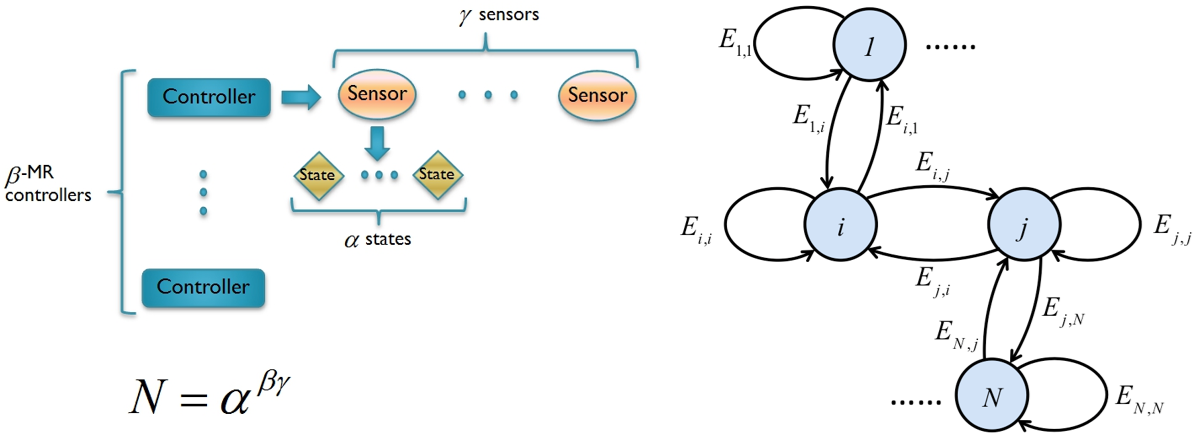
多重容錯控制器架構(左)以及代表多重容錯控制器狀態之馬可夫鏈(右)
本研究開發結合CPU分散運算(CPU distributed computing)、CPU並行運算(CPU concurrent computing)、GPU並行運算(GPU concurrent computing)功能之分散式異質檢測系統(Distributed Heterogeneous Inspection System),稱作DHIS,以滿足在高解析度影像條件下之高速檢測要求。本研究開發之技術可延伸應用於針對自主式水下無人載具(AUV)人工智慧核心主控系統之離線深度學習(Offline deep learning)。
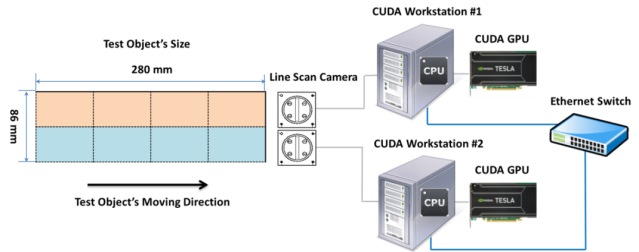
所開發之分散式異質檢測系統的硬體架構圖